



发那科伺服放大器维修公司,FANUC伺服驱动器不能启动维修,FANUC伺服驱动器过流 过压 欠压 维修,FANUC伺服驱动器 过热 过载故障维修,FANUC伺服驱动器输出不平衡 无显示维修,FANUC伺服驱动器 开关电源损坏 模块损坏维修,FANUC伺服驱动器接地故障 限流运行故障维修,FANUC伺服驱动器维修价格报价,FANUC 伺服器维修FANUC伺服放大器维修。
FANUC发那科伺服放大器维修,可修复FANUC发那科伺服驱动器常见故障:过压、欠压、过热、过载、接地、参数错误、有显示无输出、模块损坏、报错、无显示、缺相、过流等;
伺服驱动故障报警号:
400,401,402,403,404,405,406,408,409,,410,420,430,411,421,431,,413,415,423,433,414,424,434,425,435,416,426,417,420,421,422,423,427,430,431,432,433,434,435,436,437,438,439,440,441,442,443,444,445,446,447,448,449,453,456,457,458,459,460,461,462,463,464,465,466,467,468,490,491,494,495,
600,601,602,603,604,605,606,607
700,701,704,740,741,742,749,750,
5,5,900,910
报警号 报警内容
400 伺服放大器或电机过载。
401速度控制器准备号信号(VRDY )被关断。
404VRDY 信号没有被关断,但位置控制器准备好信号(PRDY )被关断。 正常情况下,VRDY 和PRDY 信号应同时存在。
405位置控制系统错误,由于 NC或伺服系统的问题使返回参考点的操 作失败。重新进行返回参考点的操作。
410X 轴停止时,位置误差超出设定值。
411X 轴运动时,位置误差超出设定值。
413X 轴误差寄存器中的数据超出极限值,或D/A 转换器接受的速度指令超出极限值(可能是参数设置的错误)。
414X轴数字伺服系统错误,检查720 号诊断参数并参考伺服系统手册。
415X 轴指令速度超出 511875 检测单位秒,检查参数 CMR
416X 轴编码器故障。
417X轴电机参数错误,检查8120 、8122、8123 、8124号参数
420Y 轴停止时,位置误差超出设定值。
421Y 轴运动时,位置误差超出设定值。
423Y 轴误差寄存器中的数据超出极限值,或D/A 转换器接受的速度指 令超出极限值(可能是参数设置的错误)。
424X轴数字伺服系统错误,检查 721 号诊断参数并参考伺服系统手册。
425轴指令速度超出 511875 检测单位秒,检查参数CMR
426Y轴编码器故障
427Y轴电机参数错误,检查 8220 、8222、8223 、8224号参数。
430Z 轴停止时,位置误差超出设定值。
431Z 轴运动时,位置误差超出设定值。
433 Z 轴误差寄存器中的数据超出极限值,或D/A 转换器接受的速度指令超出极限值(可能是参数设置的错误)。
434 Z轴数字伺服系统错误,检查 722 号诊断参数并参考伺服系统手册。
435Z轴指令速度超出 511875 检测单位秒,检查参数CMR 。
436Z 轴编码器故障。
437Z轴电机参数错误,检查8320、8322、8323、8324号参数。
2 速度控制单元+5V欠电压报警
5 直流母线欠电压报警 主回路断路器跳闸 8 1轴电动机过电流 一轴或二、三轴单元的*轴
9 M轴电动机过电流 二、三轴单元的第二轴 A N轴电动机过电流 二、三轴单元的第三轴 b L/M轴电动机同时过电流 C M/N轴电动机同时过电流 d L/N轴电动机同时过电流 E L/M/N轴电动机同时过电流
8. L轴的IPM模块过热、过流、控制电压低 一轴或二、三轴单元的*轴
9. M轴的IPM模块过热、过流、控制电压低 二、三轴单元的第二轴 A. N轴的IPM模块过热、过流、控制电压低 二、三轴单元的第三轴
b. L/M轴的IPM模块同时过热、过流、控制电压低
C. M/N轴的IPM模块同时过热、过流、控制电压低
d. L/N轴的IPM模块同时过热、过流、控制电压低
E.
L/M/N轴的IPM模块同时过热、过流、控制电压低
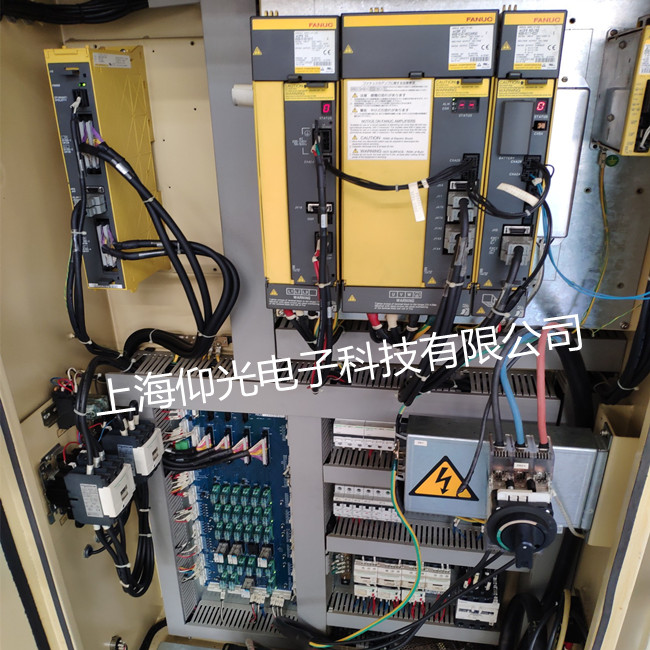
FANUC β系列数字式交流速度控制单元,带有POWER、READY、ALM 3个状态指示灯与7段数码管状态显示,指示灯与数码管的含义见表5-11。 (3)系统CRT上有报警的故障
1)FANUC-0系统的报警。FANUC数字伺服出现故障时,通常情况下系统CRT上可以显示相应的报警号,对于大部分报警,其含义与模拟伺服相同;少数报警有所区别,这些报警主要有: ①4N4报警:报警号中的N代表轴号(如:1代表X轴:2代表Y轴等,下同),报警的含义是表示数字伺服系统出现异常,详细内容可以通过检查诊断参数;诊断参数的意义见本书第5.2.3节。
表5-11 FANUCβ系列7段数码管状态一览表
POWER灯 READY灯 ALM灯 数码管显
示
含 义
备 注
● O ● - 速度控制单元未准备好
开机时显示 ● ● O O 速度控制单元准备好
● O ● Y 速度控制单元过电压报警
同HV报警 ● O ● P 直流母线欠电压报警 主回路熔断器跳闸 ●
O
●
J
再生制动回路过热报警 瞬间放电能量超过,或
再生制动单元不良或不
合适
● O ● o 过热报警 速度控制单元过热 ● O ● C 风扇故障报警
● O
c
过电流报警
主回路过流
②4N6报警:表示位置检测连接故障,可以通过诊断参数作进一步检查、判断,参见本章第
5.2.3节。
③4N7报警:表示伺服参数设定不正确,可能的原因有:
a)电动机型号参数(FANUC 0为8N20、FANUCll/15为1874)设定错误。 b)电动机的转向参数(FANUC 0为8N22、FANUCll/15为1879)设定错误。 c)速度反馈脉冲参数(FANUC 0为8N23、FANUCll/15为1876)设定错误。 d)位置反馈脉冲参数(FANUC 0为8N24、FANUCll/15为1891)设定错误。 e)位置反馈脉冲分辨率(FANUC 0为037bit7、FANUCll/15为1804)设定错误。
④940报警:它表示系统主板或驱动器控制板故障。
2)FANUC系统的报警。当使用数字伺服时,在FANUC l0/11/12及FANUC15上可以显示相应的报警。这些报警中,SV000~SVl00号报警的含义与前述的模拟伺服基本相同,不再赘述。对于数字伺服的特殊报警主要有以下几个。
①SVl01报警:编码器数据出错报警。可能的原因是编码器不良或机床位置不正确。 ②SVll0报警:串行编码器报警(串行A)。可能的原因是串行编码器不良或连接电缆不良,具体内容可以参见α/β系列伺服驱动器报警说明。 ③SVlll报警:串行编码器报警(串行C),原因同上。 ④SVll4报警:串行编码器数据出错。 ⑤SVll5报警:串行编码器通信出错。
⑥SVll6报警:驱动器主接触器(MCC)不良。 ⑦SVll7报警:数字伺服电流转换错误。
⑧SVll8报警:数字伺服检测到异常负载。
3)FANUCl6/18系统的报警。在FANUCl6/18系统中,当伺服驱动器出现报警时,CNC亦可显示相应的报警信息,这些信息包括:
①ALM400报警:伺服驱动器过载,可以通过诊断参数DGN201进一步分析,有关DGN201的说明见后述。
②ALM401报警:伺服驱动器未准备好,DRDY信号为“0”。
③ALM404报警:伺服驱动器准备好信号DRDY出错,原因是驱动器主接触器接通(MCON)未发出,但驱动器DRDY信号已为“1”。 ④ALM405报警:回参考点报警。
⑤ALM407报警:位置误差超过设定值。 ⑥ALM409报警:驱动器检测到异常负载。
⑦ALM410报警:坐标轴停止时,位置跟随误差超过设定值。 ⑧ALM411报警:坐标轴运动时,位置跟随误差超过设定值。
⑨ALM413报警:数字伺服计数器溢出。
⑩ALM414报警:数字伺服报警,详细内容可以参见诊断参数DGN200~204的说明。 ⑾ALM415报警:数字伺服的速度指令超过了极限值(511875P/s),可能的原因是机床参数CMR设定错误。
⑿ALM416报警:编码器连接出错报警,详细内容可参见诊断参数DGN201的说明。 ⒀ALM417报警:数字伺服参数设定错误报警,相关的参数有:PRM2020/2022/2023/2024/2084/2085/1023等。
⒁ALM420报警:同步控制出错。
⒂ALM421报警:采用双位置环控制时,位置误差超过。 在系统使用编码器时,报警还包括以下内容: ①ALM300报警:坐标轴需要手动回参考点操作。 ②ALM301报警:编码器通信出错。
⑧ALM302报警:编码器数据转换出现超时报警。 ④ALM303报警:编码器数据格式出错。 ⑤ALM304报警:编码器数据奇偶校验出错。 ⑥ALM305报警:编码器输入脉冲错误。
⑦ALM306报警:编码器电池电压不足,引起数据丢失。 ⑧ALM307报警:编码器电池电压到达更换值。 ⑨ALM308报警:编码器电池报警。
⑩ALM308报警:编码器回参考点不能进行。
在系统使用串行编码器时,串行编码器报警内容如下:
①ALM350报警:串行编码器故障,具体内容可以通过诊断参数DGN202/204检查。 ②ALM351报警:串行编码器通信出错,具体内容可以通过诊断参数DGN203检查。

3.交流伺服电动机的维修
(1)交流伺服电动机的基本检查 原则上说,交流伺服电动机可以不需要维修,因为它没有易损件。但由于交流伺服电动机内含有精密检测器,因此,当发生碰撞、冲击时可能会引起故障,维修时应对电动机作如下检查: 1)是否受到任何机械损伤?
2)旋转部分是否可用手正常转动?
3)带制动器的电动机,制动器是否正常?
4)是否有任何松动螺钉或间隙?
5)是否安装在潮湿、温度变化剧烈和有灰尘的地方?等等。
(2)交流伺服电动机的安装注意点 维修完成后,安装伺服电动机要注意以下几点:
1)由于伺服电动机防水结构不是很严密,如果切削液、润滑油等渗入内部,会引起绝缘性能降低或绕组短路,因此,应注意电动机尽可能避免切削液的飞溅。
2)当伺服电动机安装在齿轮箱上时,加注润滑油时应注意齿轮箱的润滑油油面高度必须低于伺服的输出轴,防止润滑油渗入电动机内部。
3)固定伺服电动机联轴器、齿轮、同步带等连接件时,在任何情况下,作用在电动机上的力不能超过电动机容许的径向、轴向负载(见表5-12)。
表5-12 交流伺服电动机容许的径向、轴向负载
电机形式 容许的径向负载
1―0,2―0 25kg 10,20,30,30R
450kg 0, 5
75kg
4)按说明书规定,对伺服电动机和控制电路之间进行正确的连接(见机床连接图)。连接中的错误,可能引起电动机的失控或振荡,也可能使电动机或机械件损坏。当完成接线后,在通电之前,必须进行电源线和电动机壳体之间的绝缘测量,测量用500兆欧表进行:然后,再用表检查信号线和电动机壳体之间的绝缘。注意:不能用兆殴表测量脉冲编码器输入信号的绝缘。
(3)脉冲编码器的更换 如交流伺服电动机的脉冲编码器不良,就应更换脉冲编码器。更换编码器应按规定步骤进行,以FANUC S系列伺服电动机为例,编码器在交流伺服电动机中的安装如图5-16所示,更换步骤如下:
1―电枢线插座 2―连接轴 3―转子 4―外壳 5―绕组 6―后盖联接螺钉 7―安装座
8―安装座联接螺钉 9―编码器固定螺钉 10―编码器联接螺钉 11―后盖 12―橡胶盖
13―编码器轴 14―编码器电缆 15―编码器插座
图5-16 伺服电动机结构示意图
1)松开后盖联接螺钉6,取下后盖11。 2)取出橡胶盖12。
3)取出编码器联接螺钉10,脱开编码器和电动机轴之间的联接。 4)松开编码器固定螺钉9,取下编码器。
注意:由于实际编码器和电动机轴之间是锥度啮合,联接较紧,取编码器时应使用专门的工具,小心取下。
5)松开安装座的联接螺钉8,取下安装座7。
编码器维修完成后,再根据图5-16重新安装上安装座7, 并固定编码器联接螺钉10,使编码器和电动机轴啮合。
为了保证编码器的安装位置的正确,在编码器安装完成后,应对转子的位置进行调整,方法如下:
1)将电动机电枢线的V、W相(电枢插头的B、C脚)相连。
2)将U相(电枢插头的A脚)和直流调压器的“+”端相联,V、W和直流调压器的“-”端相联(见图5-17a),编码器加X+5V电源(编码器插头的J、N脚间)。
3)通过调压器对电动机电枢加入励磁电流。这时,因为Iu=IV+IW。,且Iv=Iw,事实上相当于使电动机工作在图5-17b所示的90°位置,因此伺服电动机(永磁式)将自动转到U相的位置进行定位。
注意:加入的励磁电流不可以太大,只要保证电动机能进行定位即可(实际维修时调整在3―5A)。
4)在电动机完成U相定位后,旋转编码器,使编码器的转子位置检测信号C1、C2、C4、C8(编码器插头的C、P、L、M脚)同时为“1”,使转子位置检测信号和电动机实际位置一致。 5)安装编码器固定螺钉,装上后盖,完成电动机维修。
转载请注明出处:上海仰光电子科技专业伺服驱动器维修,伺服电机维修
本文链接:http://www.shygdz.com/fuwu/Services_Show4380.htm
伺服驱动器维修 伺服电机维修 触摸屏维修 变频器维修
联系方式:
电话:021-50157782
手机:13817011982 微信同号
邮箱:shygdzi@163.com
联系人:张工
网址:http://www.shygdz.com
【 我们确保修好测试好给客户!!!!】
上一篇:派克伺服驱动器维修常见故障代码报警维修
下一篇:fagor电机常见故障排查及维修
